|
SLIP
1.4
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
SLIP
1.4
|
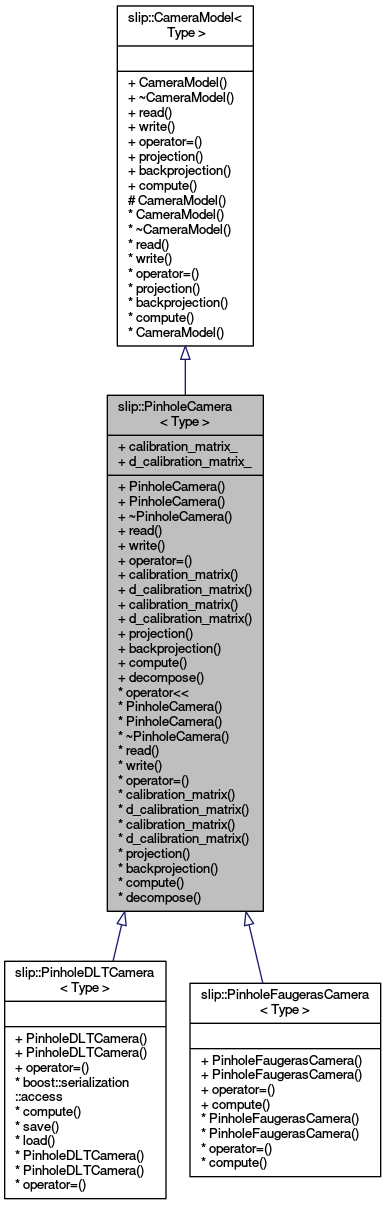
Define a PinholeCamera class. More...
#include <PinholeCamera.hpp>
Public Member Functions | |
Constructors & Destructors | |
| PinholeCamera () | |
| Default constructor of PinholeCamera. More... | |
| PinholeCamera (const self &rhs) | |
| Constructs a copy of the PinholeCamera rhs. More... | |
| ~PinholeCamera () | |
| Destructor of the PinholeCamera. More... | |
input/output methods | |
| void | read (const std::string &file) |
| Read a calibration matrix from an ASCII file. More... | |
| void | write (const std::string &file) |
| Write a calibration matrix to an ASCII file. More... | |
Assignment operators and methods | |
| self & | operator= (const self &rhs) |
| Assign a PinholeCamera. More... | |
Accessor/Mutator operators | |
| slip::Matrix< Type > & | calibration_matrix () const |
| Get calibration matrix. More... | |
| slip::Matrix< Type > & | d_calibration_matrix () const |
| Get back d_calibration matrix. More... | |
| void | calibration_matrix (const slip::Matrix< Type > &calibration_matrix) |
| Set the calibration matrix. More... | |
| void | d_calibration_matrix (const slip::Matrix< Type > &d_calibration_matrix) |
| Set the d_calibration matrix. More... | |
Projection methods | |
| slip::Point2d< Type > | projection (const slip::Point3d< Type > &p) |
| Computes the projection of a 3d world point onto the image plane. More... | |
| slip::Point3d< Type > | backprojection (const slip::Point2d< Type > &p2, const Type &z) |
| Computes the 3d world point corresponding to the backprojection of an image point. More... | |
Computation methods | |
| virtual void | compute (const slip::Matrix< Type > &P) |
| Computes the parameters of the pinhole camera model. More... | |
Decomposition methods | |
| virtual int | decompose (slip::Matrix< Type > &K, slip::Matrix< Type > &R, slip::Vector3d< Type > &c, slip::DECOMP_TYPE flag) |
| Decomposes a pinhole camera matrix. More... | |
Public Attributes | |
| slip::Matrix< Type > * | calibration_matrix_ |
| slip::Matrix< Type > * | d_calibration_matrix_ |
Friends | |
| class | boost::serialization::access |
i/o operators | |
| std::ostream & | operator<< (std::ostream &out, const self &c) |
| Write the PinholeCamera to the ouput stream. More... | |
Define a PinholeCamera class.
| Type | Type of the coordinates of the PinholeCamera |
Definition at line 100 of file PinholeCamera.hpp.
|
inline |
Default constructor of PinholeCamera.
Definition at line 129 of file PinholeCamera.hpp.
|
inline |
Constructs a copy of the PinholeCamera rhs.
| rhs | an other PinholeCamera. |
Definition at line 138 of file PinholeCamera.hpp.
|
inline |
Destructor of the PinholeCamera.
Definition at line 148 of file PinholeCamera.hpp.
|
inlinevirtual |
Computes the 3d world point corresponding to the backprojection of an image point.
| p | Point2d. |
| z | Depth coordinate. |
Computes the 3d world point corresponding to the backprojection of an image point.
| p | Point2d. |
| z | Depth coordinate. |
Implements slip::CameraModel< Type >.
Definition at line 391 of file PinholeCamera.hpp.
|
inline |
Get calibration matrix.
Definition at line 257 of file PinholeCamera.hpp.
|
inline |
Set the calibration matrix.
| calibration_matrix | Calibration matrix. |
Definition at line 274 of file PinholeCamera.hpp.
|
inlinevirtual |
Computes the parameters of the pinhole camera model.
| P | Matrix containing the input data. |
 are the image coordinates,
are the image coordinates,  are the world coordinates.
are the world coordinates.
![\[ \begin{array}{ccccc} \cdots & \cdots & \cdots & \cdots & \cdots \\ x_{i} & y_{i} & X_{i} & Y_{i} & Z_{i} \\ \cdots & \cdots & \cdots & \cdots & \cdots \\ \end{array} \]](../../form_224.png)
Implements slip::CameraModel< Type >.
Reimplemented in slip::PinholeFaugerasCamera< Type >, and slip::PinholeDLTCamera< Type >.
Definition at line 443 of file PinholeCamera.hpp.
|
inline |
Get back d_calibration matrix.
Definition at line 265 of file PinholeCamera.hpp.
|
inline |
Set the d_calibration matrix.
| d_calibration_matrix | Back-calibration matrix. |
Definition at line 286 of file PinholeCamera.hpp.
|
inlinevirtual |
Decomposes a pinhole camera matrix.
| K | Matrix containing the internal parameters |
| R | Matrix containing the external parameters |
| c | Vector3d containing the camera centre |
| flag | Flag of type DECOMP_TYPE, can be 'RQ' or 'direct' |
Definition at line 466 of file PinholeCamera.hpp.
|
inline |
Assign a PinholeCamera.
Assign elements of PinholeCamera in rhs
| rhs | PinholeCamera to get the values from. |
Definition at line 230 of file PinholeCamera.hpp.
|
inlinevirtual |
Computes the projection of a 3d world point onto the image plane.
| p | Point3d. |
are the image coordinates, are the world coordinates.
![\[ \left( \begin{array}{c} s_x x \\ s_y y \\ s \end{array} \right) = \left( \begin{array}{cccc} m_{11} & m_{12} & m_{13} & m_{14} \\ m_{21} & m_{22} & m_{23} & m_{24} \\ m_{31} & m_{32} & m_{33} & m_{34} \\ \end{array} \right) \left( \begin{array}{c} X \\ Y \\ Z \\ 1\\ \end{array} \right) \]](../../form_223.png)
Implements slip::CameraModel< Type >.
Definition at line 322 of file PinholeCamera.hpp.
|
inlinevirtual |
Read a calibration matrix from an ASCII file.
| file | File path name. |
![\[ \begin{array}{cccc} m_{11} & m_{12} & m_{13} & m_{14} \\ m_{21} & m_{22} & m_{23} & m_{24} \\ m_{31} & m_{32} & m_{33} & m_{34} \\ \end{array} \]](../../form_222.png)
Implements slip::CameraModel< Type >.
Definition at line 193 of file PinholeCamera.hpp.
|
inlinevirtual |
Write a calibration matrix to an ASCII file.
| file | File path name. |
Implements slip::CameraModel< Type >.
Definition at line 212 of file PinholeCamera.hpp.
|
friend |
Definition at line 494 of file PinholeCamera.hpp.
|
friend |
Write the PinholeCamera to the ouput stream.
| out | output stream. |
| c | PinholeCamera to write to the output stream |
Definition at line 544 of file PinholeCamera.hpp.
| slip::Matrix<Type>* slip::PinholeCamera< Type >::calibration_matrix_ |
Definition at line 490 of file PinholeCamera.hpp.
| slip::Matrix<Type>* slip::PinholeCamera< Type >::d_calibration_matrix_ |
Definition at line 491 of file PinholeCamera.hpp.
 1.8.6
1.8.6